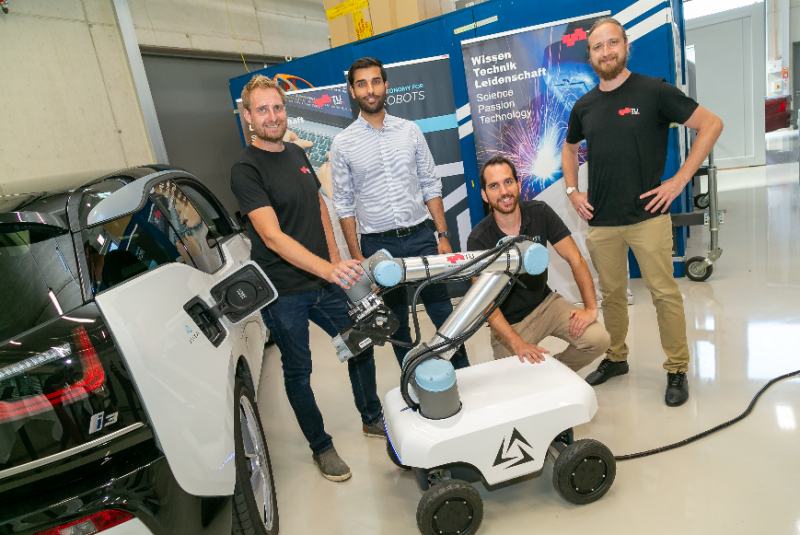

Im E-Laderoboter verschmelzen zwei Komponenten zu einer Einheit: eine mobile Plattform, die sich autonom im Raum bewegen kann und ein automatisierter Roboterarm, der das Ladekabel am Auto ansteckt. Die Plattform orientiert sich selbstständig im Raum und bewegt sich mit bis zu 20 km/h auf das Fahrzeug zu. Der auf dem Torso montierte Roboterarm führt das Ladekabel zum „Tankdeckel“ und dockt dort an. Nach dem (Schnell-)Ladevorgang steckt sich der Roboter wieder ab und entfernt sich vom Fahrzeug.
„Der Tank- oder Ladevorgang eines Fahrzeugs ist für den Menschen keine große Herausforderung. Für ein automatisiertes System ist das hingegen eine sehr komplexe, millimetergenaue Angelegenheit“, berichtet Bernhard Walzel vom Institut für Fahrzeugtechnik der TU Graz. Walzel und sein Institutskollege Helmut Brunner haben bereits 2018 mit einem stationären Laderoboter aufhorchen lassen. Nun haben die beiden Techniker mit den beiden Partnerfirmen Alveri und Arti Robots intensiv am Demonstrator einer autonomen, mobilen Version gearbeitet. Hinter den Bemühungen steckt die Motivation, der E-Mobilität zu mehr Fläche zu verhelfen: „Österreichweit gibt es derzeit rund 8.000 öffentlich verfügbare Ladestationen. Das ist ein echter Hemmschuh für die Verbreitung der E-Mobilität. Wer ständig überlegen muss, wie weit die nächste E-Tankstelle entfernt ist, fährt eher unentspannt. Wir müssen daher mit der Ladeinfrastruktur nachziehen. Ein mobiler Laderoboter – zum Beispiel in Parkhäusern, auf Park&Ride-Plätzen oder größeren Geschäftsparkflächen kann dazu einen entscheidenden Beitrag leisten und die empfundene Sorge um Reichweite und Lademöglichkeiten nehmen.“
Ein offenes Thema der E-Mobilität insgesamt sind Schnittstellen, etwa zwischen autonomen Systemen, digitalen Technologien und innovativen Antriebskonzepten, wie Bernhard Walzel weiß: „Es hat sich in den vergangenen Jahren unglaublich viel bewegt in der Entwicklung von E-Fahrzeugen, der notwendigen Infrastruktur, Lademöglichkeiten und automatisierten Systemen. Wichtig wäre nun, dass die einzelnen Systeme auch miteinander kommunizieren. Momentan müssen wir dem Roboter noch durch den geöffneten „Tankdeckel“ signalisieren, welches Auto er laden soll. Das Ziel muss sein, dass das Fahrzeug seinen Ladebedarf eigenständig dem Roboter meldet. Oder dass die Fahrerin bzw. der Fahrer per App einen Roboter aktiviert. Da wird sich in naher Zukunft noch viel bewegen“
Auch der ACstyria zeigt sich begeistert: „Das Konzept von Alveri und der Technischen Universität Graz ist ein wichtiger Impuls in gleich mehreren Zukunftsfeldern der Mobilität: Initiativen in den Bereichen Digitalisierung, Autonome Systeme und auch Innovative Antriebskonzepte sind wichtig, um unsere Vorreiterrolle weiter auszubauen," sagt Christa Zengerer, Geschäftsführung ACstyria Mobilitätscluster.
Das Institut für Fahrzeugtechnik der TU Graz ist in der Entwicklung von automatisierten Laderoboter mittlerweile zwar sehr erfahren, bislang waren diese jedoch nicht mobil. Dafür sorgte nun Arti Robots mit der universell einsetzbaren mobilen autonomen Plattform Chasi. Alveri bringt in das Projekt Erfahrung im Bereich Usability und Anwendungsszenarien ein und ist auch für das Design verantwortlich.