

Was lässt sich heute bereits beim Fahren automatisieren und wie wird‘s weitergehen?
Wir haben heute schon aktuelle Autos verschiedener Hersteller, die bereits „selbst fahren“, bei denen sich als Option die ACC-Funktionalität, also Abstandstempomat mit einem Spurhalte- oder sogar Spurzentriersystem – welches das Fahrzeug genau in der Spurmitte hält – koppeln lässt. Wenn man das aktiviert, nennt sich das, je nach Hersteller, heute zum Beispiel Stauassistent oder „pilotiertes Fahren“.
Ist die Funktion, um dies zu erreichen, heute bereits mit den Kartendaten gekoppelt?
Heute noch nicht, aber das Fahrzeug kann sich über die Spurerkennung aber auch am vorausfahrenden Auto orientieren, wenn man im Stau, umgeben von anderen Fahrzeugen, sehr langsam fährt. Das ist wichtig, weil im Stau in der Regel sehr dicht aufgefahren wird und dann die Kamera an der Windschutzscheibe die Spurmarkierungen eventuell nicht mehr erkennen kann.
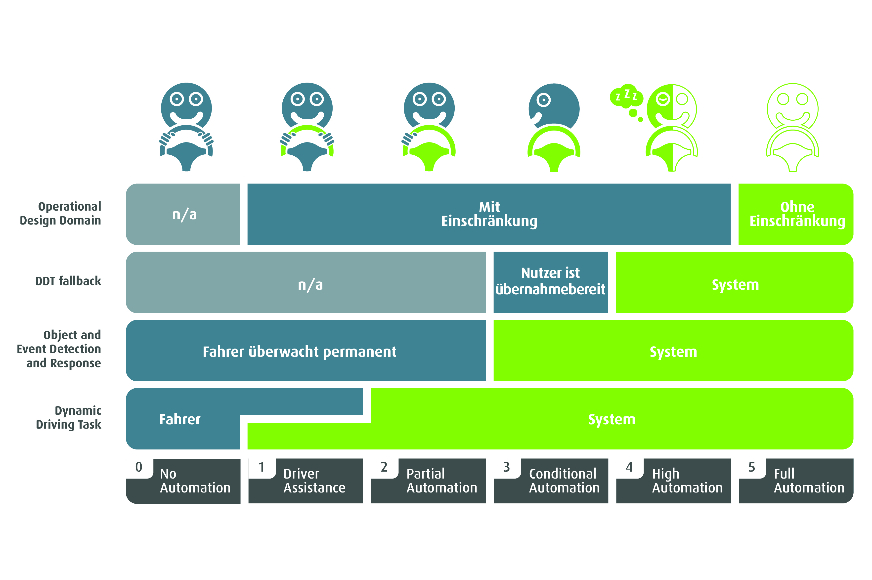
Beim pilotierten Fahren fährt das Auto für den Fahrer: Der muss weder Gas noch Bremse betätigen, aber die Hand am Lenkrad halten, obwohl das Auto eigentlich selbst lenkt, weil das gesetzlich gefordert wird. Im Industriejargon heißt das Level 2. GM vertreibt derzeit in den USA im Moment als einziger ein „Hands-Off-System“ und nennt das „Super Cruise“. Das ist zwar nach wie vor ein Level 2-System, aber weil der Hersteller nicht mehr über das Lenkrad die Rückmeldung hat, dass der Fahrer noch aufmerksam ist, wird dabei eine kleine Kamera – mit Infrarot, damit es auch in der Nacht funktioniert – eingesetzt, die den Fahrer unauffällig überwacht, ob er noch durch die Frontscheibe schaut, nur blinzelt oder die Augen schon geschlossen oder sich überhaupt bereits anderen Dingen zugewendet hat. Sollte das für längere Zeit der Fall sein, kommt auch da die Aufforderung, die Aufmerksamkeit doch wieder dem Fahrgeschehen zuzuwenden, sonst würde die Systemfunktionalität zurückgefahren oder deaktiviert.
Eigentlich fährt das Auto aber doch selbst?
Das Auto übernimmt aber keine Verantwortung! Der Fahrer überwacht das System: Irrt es sich an irgendeiner Stelle oder tritt eine Situation ein, mit der das System überfordert ist –, zum Beispiel, wenn ein anderes Fahrzeug sehr knapp von der Seite einschert und eine Notbremsung erforderlich ist – kommt das System heute vielleicht noch an seine Grenzen und der Fahrer muss manuell eingreifen. Dazu muss der wach und aufmerksam bleiben. Die meisten Hersteller lösen dies in der Form, dass der Fahrer die Hände noch am Steuer lassen muss. Nimmt er nämlich die Hände vom Steuerrad, kommt ein Warnton und die Aufforderung: „Lenkrad nehmen!“.
Was bieten die folgenden Stufen noch?
Der große Schritt, auf den wir uns momentan vorbereiten, ist der von Level 2 auf Level 3: Auch wenn bei beiden Stufen das Auto selbst fährt, würde ich beim Level 2 noch vom „assistierten“, bei Level 3 vom „automatisierten Fahren“ sprechen. Denn bei 3 übernimmt das Fahrzeug die Verantwortung, die bei 2 noch der Fahrer hat. Wenn Sie bei Stufe 3 im Automatikmodus sind, werden Sie sich abwenden und etwas anderes tun dürfen. Weil der Fahrer dann das Fahrgeschehen nicht mehr beobachten muss, kann der auch zur Seite schauen oder sich länger der Rückbank zuwenden, E-Mails checken, vielleicht sogar eine Folge seiner Lieblingsserie streamen – das dürfte bei entsprechender Fahrzeugvernetzung und -infotainment kein Problem sein. Das System, das vorher der Fahrer noch überwacht hat – auch ob es an seine Grenzen kommt –, kann sich, zusätzlich zu der Fähigkeit fahren zu können, auch selbst überwachen: Jetzt überwacht es sich selbst. Dazu müssen wir im System eine Redundanz einbauen.
Wie weit kann sich der Fahrer bereits „ausklinken“?
Dabei machen mindestens 2 verschiedene Technologien das Gleiche, die müssen einverstanden sein, sonst würde das System eingreifen, verlangsamen und den Fahrer fragen, nochmals zu übernehmen – nicht sofort, aber innerhalb einiger Sekunden und auf sichere Weise. Das heißt, wenn Sie das System bittet, müssen Sie in der Lage sein, relativ zügig übernehmen zu können. Schlafen können Sie dabei noch nicht, denn dann könnte die Übernahme der Fahrt nicht schnell genug erfolgen! Schlafen wäre Stufe 4: In der kommt zusätzlich dazu, dass sich das System selbst überwachen und dass es, sollte etwas schief gehen – zum Beispiel ein Sensor ausfallen –, das Fahrzeug noch anhalten und in einen sicheren Zustand bringen könnte. Bei Stufe 4 kann der Fahrer auch mal ein Nickerchen machen: Das sieht man dann meist schon am Konzept des Innenraums, der dann auch anders gestaltbar wird und bei dem die Sitze drehbar sind oder sich das Lenkrad wegfalten lässt. Das ist dann noch einmal ein paar Jahre nach der Stufe 3.
Wie zuverlässig ist so ein System und wo wird es zuerst eingebaut werden?
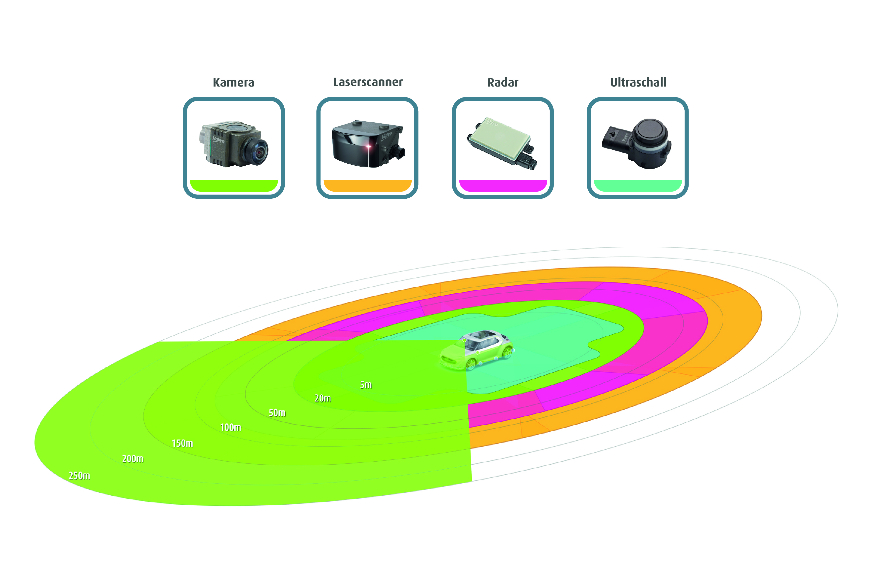
Wie gesagt, wir können uns nicht allein auf ein System verlassen: Ein Radarsensor kann einmal von der Physik oder der Situation „ausgetrickst“ werden, eine Kamera einmal überfordert sein, zum Beispiel durch die sehr tief stehende Sonne oder feuchte Fahrbahn, daher die Redundanz. Das heißt: Wenn ein Sensor Schwierigkeiten hat, sind ein oder zwei weitere Technologien verbaut, Radar- oder Lidar-Technologie, die eben diese Schwierigkeit nicht haben und die auch sichere Funktionalität ermöglichen, um auf der sicheren Seite zu sein. Also: Niedrig stehende Sonne darf nicht zu Unfällen führen.
Der Schritt von Level 2 auf Level 3 ist ein großer, den müssen wir verantwortungsvoll gehen. Das tun wir in der Form, dass wir ihn auch technisch begleiten. Die Technik wird nochmals deutlich aufwendiger sein als das was heute angeboten wird. Das würde für Stufe 3 nicht mehr reichen, da müssen sie etwas mehr an Sensorik aufwenden, etwas mehr Rechenleistung, unvergleichbar viel mehr Zeit und Aufwand investieren in Test, Absicherung und Freigabe. Darin steckt ein großes Investment. Die Option wird auch preislich sicherlich deutlich 4-stellig sein. Daher beginnt man mit dieser Innovation nicht in der kleinsten Baureihe, denn dort wäre so ein Aufpreis unverhältnismäßig hoch – aber von der Stückzahl und den Ausstattungsraten wird es wohl erst einmal im Premiumsegment angeboten. Bei Fahrzeugen der Oberklasse fällt so ein Preis für die Option im Verhältnis weniger ins Gewicht und spricht jemand an, der nicht ganz so preissensitiv ist und es sich auch leisten kann.
Das bedeutet auch, mehr anspruchsvolle Werkstattarbeit nach einem Unfall?
Wird solch ein Fahrzeug bei einem Unfall wesentlich beschädigt, ist das ein deutlicher Mehraufwand in der Werkstatt – und es werden auch mehr oder teurere Teile getauscht werden müssen. Ich erwarte, dass die Versicherungsprämien für solcherart ausgerüstete Fahrzeuge deutlich nach unten gehen, zumal sie deutlich mehr Sicherheit eingebaut und daher deutlich weniger Unfälle haben werden, auch wenn dem als Gegenkalkulation im Fall eines Unfalls tendenziell etwas höherer Reparaturaufwand gegenübersteht. Unterm Strich denke ich, dass in Summe deutliche Einsparungen erzielbar werden. Das sehen wir auch heute schon in Fahrzeugen mit Notbremsassistenten: Die Auffahrunfälle gehen dadurch zurück, diese Versicherungsfälle werden seltener.
Mit welchen Jahreszahlen könnte man den Zeitraster dieser Entwicklungen grob versehen?
Ganz grob und allgemein gesagt ist mit der Stufe 3 ungefähr 2020/21 bei mehreren Herstellern zu rechnen – es mag auch den einen oder anderen geben, der schon 2019 damit auf den Markt kommt – und die Stufe 4 für die Autobahn wird dann 2023 bis 2025 soweit sein. In unterschiedlichen Ländern und Regionen gibt es unterschiedliche rechtliche Rahmenbedingungen, aber in vielen Ländern der Welt müssen Fahrzeuge die ECE-Norm R79 als Lenkungsvorschrift erfüllen. Die schreibt vor, dass man Autos bei hohen Geschwindigkeiten nicht autonom lenken lassen darf, sondern nur Lenkassistenten einführen kann. Die Norm wird derzeit in den internationalen Gremien überarbeitet. Damit wird man in Kürze auf Autobahnen automatisch lenken können. Das brauchen wir für den Schritt zur Stufe 3: Einschränkend wird die R79 dabei allerdings festlegen, dass das System nur auf Straßen mit baulicher Trennung zwischen den Richtungsfahrbahnen mit mindestens 2 Fahrspuren in einer Richtung benutzt werden darf, also auf gut ausgebauten Bundesstraßen und Autobahnen. Das grenzt uns zwar ein wenig ein, das macht aber auch Sinn. Auch wenn der Unterschied für den Nutzer gar nicht so groß ist: Für uns als Techniker ist es ein großer Schritt, wenn die Verantwortung vom Fahrer an die Technik übergeht.
Wann wird dann auch auf Landstraßen autonomes Fahren möglich sein?
Daher ist es sinnvoll, damit nicht auf allen Straßen, sondern auf Straßen mit baulicher Trennung der Fahrtrichtungen und mindestens 2 Fahrspuren in eine Richtung, wie gut ausgebaute Schnellstraßen und Autobahnen, zu beginnen. Das grenzt uns ein wenig ein, das ist aber auch sinnvoll, denn das Auto fährt nicht nur selbst, sondern beim Schritt zu Stufe 3 geht die Verantwortung an die Technik über. Das ist für Techniker ein sehr großer Schritt und daher beginnt man auf autobahnähnlichen Straßen, die in der Regel Zufahrtsbeschränkungen, keine Kreuzungen und keine Ampeln haben, dort fahren keine Fahrräder oder sehr langsame Traktoren mehr. Sollten eine Baustelle oder andere Verkehrsstörung sein, so sind die in aller Regel mittels Beschilderung angekündigt oder bekannt. Das alles können wir mit der Technik bewältigen. Denn es geht darum, den Übergang der Verantwortung an die Technik auch verantwortlich zu gestalten. Der Schritt auf die Landestraße ist noch in etwas weiterer Zukunft. Ob der dann 2025 oder 2027 oder gar noch später kommt, wird sich zeigen. Wir sammeln erst noch Erfahrung, wenn wir im Markt sind und daraus lernen. Wir arbeiten auch daran. Das ist verantwortungsbewusst.
Auch die Périphérique in Paris ist eine Art Autobahn mit viel unübersichtlichem Verkehr...
Ja, die Périphérique ist auch eine autobahnähnliche Strecke und bietet große Herausforderungen, wir erproben auf der Périphérique. Es gibt in anderen Städten Europas und der Welt ähnliche, vielleicht noch schlimmere Verhältnisse, aber die Périphérique ist schon eine Herausforderung. Zum einen, weil die Infrastruktur sehr unterschiedlich ist: Manchmal sind die Markierungen da und manchmal schlecht, es gibt Tunnels und Halbtunnels und Schattenwurf. Das ist schon herausfordernd für die Kameras. Sie haben teilweise sehr dichten Verkehr, zum Teil sehr aggressives Verhalten der anderen Verkehrsteilnehmer, sehr dichtes aneinander Vorbeifahren, namentlich auch von sehr vielen Motorradfahrern – und das nicht nur im Stillstand, sondern auch während der Fahrt – sehr dichtes Ein- und Ausscheren und damit muss der Mensch und auch das System klarkommen. Wir fühlen uns da ganz gut zu Hause, aber es ist schon eine Herausforderung und da steckt schon Arbeit drin.
Welche Bedeutung hat das autonome Fahren für Nutzfahrzeuge bzw. den Logistikbereich?
Bei Nutzfahrzeugen sehe ich 2 Entwicklungen: Bei einen autonomen Logistikkonzept wird an unterschiedlichen Themen gearbeitet, da sind manche Konzepte noch in der Ausprobier-Phase. Da wird sich nicht alles, aber manches durchsetzen. Der Güterfernverkehr, bei dem Lkw weite Strecken fahren und lange Strecken auf Autobahnen zurücklegen, ist schon in Europa ein großes Problem. Denken wir ein bisschen außerhalb Europas: In Nordamerika oder China gibt es wirklich zahlreiche Strecken, auf denen es sehr lange geradeaus geht. Dafür kann man Platooning-Konzepte durchdenken, bei denen mehrere Lkw in einem Straßenzug aneinander aufgestaffelt werden. Dabei könnte man zunächst den 1. Lkw noch manuell fahren, dahinter synchronisieren sich die Lkw wie mit einer elektronischen Deichsel, können dadurch etwas dichter auffahren, was auch wieder hilft, den Spritverbrauch zu senken und CO2 zu sparen, aber dann können die Fahrer in den nachfolgenden Fahrzeugen entweder Schreibarbeiten erledigen oder Pausenzeiten einlegen, um die Zeit effektiver zu nutzen: Denn heute ist Lkw-Fahren sehr zeitintensiv und die Logistikbranche hat in manchen Ländern und Regionen tatsächlich auch Schwierigkeiten, genug Fahrer zu finden – nicht nur in Österreich. Da müssen wir nach vorne denken, wie wir einerseits das Berufsbild wieder attraktiver machen und andererseits die zur Verfügung stehende Manpower noch effektiver einsetzen können.
Und wie schnell wird im Lkw-Bereich was möglich werden?
Da gibt es gerade in Europa, auch von der EU finanziert, schon einige Projekte in Erprobung. Wir sind inzwischen soweit, dass die Lkw-Hersteller auch markenübergreifend die Platoonings verknüpfen. Die Technik ist auch da auf der Zielgeraden. Dann muss nur der Rahmen gesetzt werden, dass das – obwohl der Fahrer noch im Lkw sitzt – als Pausenzeit angerechnet werden kann, wenn er denn wirklich nicht fährt oder eine Nebentätigkeit, zum Beispiel die Papiere abarbeiten, um die nächste Be- bzw. Entladung vorzubereiten, ausführen kann.
Gibt es für große Lkw auch so etwas wie Einparksysteme?
Es gibt auch Konzepte, bei denen man Lkw oder große Sattelzüge assistiert oder automatisiert rangiert. Das macht auf engen oder stark frequentierten Betriebshöfen durchaus Sinn, auch da ist dann immer die Frage: Wie viel Intelligenz stecken wir in die Infrastruktur und wie viel in die Lkw selbst? Die große Herausforderung bei Langstrecken-Lkw ist, dass sie aus Sattelschlepper und immer wieder durchgewechseltem Auflieger bestehen. Es nutzen auch nicht alle Speditionen ihre eigenen Auflieger, sondern wechseln diese wie Container. Punkto Gestaltung der Technologie ist das für uns eine Herausforderung, denn die Firmen investieren in Zugmaschinen, aber warum sollten die bei Trailern, die sie nur zu einem Bruchteil benutzen, in Technologie investieren? Das ist aber auch technisch eine Herausforderung, denn man kann nicht alles in die Zugmaschine packen. Auch die 10 m Auflieger dahinter wollen überwacht werden.
Wann wird es erste konkrete Anwendungen in der Serie geben?
Eine erste konkrete Anwendung, auch da eher nicht automatisiert, sondern für die Sicherheit, ist der Abbiegeassistent, den wir im Programm haben und bei dem wir ganz neu eine Kooperation mit Wabco geschlossen haben, um uns nach dem Pkw-Sektor auch auf dem Nutzfahrzeugsektor, wo Wabco bereits einen großen Namen hat, entsprechendes Renommee aufzubauen. Ganz grob: Wir liefern die Technik und Wabco kennt die Kunden und übernimmt den Vertrieb. Das wird, glaube ich, sehr erfolgreich.
Werden diese Systeme auch zum Nachrüsten angeboten werden?
Im Lkw-Bereich sprechen wir immer auch von Nachrüstmöglichkeiten, wobei der 1. Schritt in die Erstausrüstung geht; das Nachrüsten ist dann der 2. Schritt. Das ist ein sehr attraktiver Markt, weil der Abbiegeassistent in wenigen Jahren in Europa Vorschrift werden wird, das heißt, 100.000 Lkw werden es pro Jahr haben. Wir kennen den Markt und über Wabco als anerkannter etablierter Player, der die Kunden kennt, als Vertriebspartner ist das eigentlich „zum Erfolg verdammt“.
Wie lässt sich generell verhindern, dass autonom fahrende Autos öfter als menschliche Fahrer ratlos stehenbleiben?
Zum einen werden wir, wenn wir autonom fahren, sicherheitsorientiert fahren müssen. Ja, wir werden einen eher passiven Fahrstil an den Tag legen. Das heißt, wir werden zuerst einmal zurückhaltend-beobachtend fahren, aber nicht aggressiv-sportlich unterwegs ein, wobei ich das auch nicht für irgendwann ausschließen will. Das ist kein Dogma. Wir dürfen aber nicht zögerlich fahren – und das aus 2 Gründen: Vermittelt man dem Nutzer den Eindruck, dass er im Automatikmodus deutlich später ans Ziel kommt, wird der den Mehrwert der Entspannung und des „Gefahren“-werdens irgendwann hintanstellen und doch wieder selbst fahren. Andererseits muss man für die anderen Verkehrsteilnehmer berechenbar sein, um nicht das Unfall-, speziell das Auffahrrisiko zu erhöhen. Vielleicht wird man mit dem manuellen Modus etwas früher am Ziel sein können, dafür konnte sich der Fahrer nicht entspannen oder anderes tun. Aber wir müssen dem System schon ein gewisses Selbstvertrauen mitgeben. Wenn zum Beispiel das Reißverschlusssystem anzuwenden ist und alle Fahrzeuge in etwa gleicher Geschwindigkeit fahren, wird das autonome System auch eine Lücke nutzen, wodurch der Sicherheitsabstand momentan vielleicht nicht gegeben ist und sich wieder einpegeln muss. Ich muss den anderen Verkehrsteilnehmern auch zutrauen, dass die aufmerksam sind und miteinander einen kooperativen Fahrstil pflegen. Trotzdem wird ein sehr sportlicher Fahrer autonom fahrend, je nach der Fahrstrecke, die eine oder andere Minute verlieren, aber dafür kann er sich anderen Aufgaben als dem Fahren widmen. Wir haben aber nicht vor, irgendjemand seinen Fahrspaß zu nehmen. Der Mensch ist ein extrem guter und sicherer Fahrer. Doch auf längeren Strecken, im Stau oder für den Berufsverkehr, wo Fahren eher Routine als Spaß ist, bin ich überzeugt, dass wir der Menschheit etwas Gutes tun, wenn wir zu einem vernünftigen Preis einen Piloten anbieten können, der das Fahren auf einem bestimmten Streckenabschnitt übernimmt und der Fahrer die Zeit anders nutzen kann – und sei es zur Entspannung.
Werden Assistenzsysteme, die resolut alle Gefahren ausschalten und waghalsige Fahrmanöver konsequent vermeiden, den Fahrstil insgesamt verändern?
Im automatisierten Fahrmodus werden wir die Sicherheit immer an erster Stelle stellen. Es ist durchaus vorstellbar, auch hier einen eher komfortorientierten von einem sportlicheren Fahrstil zu unterscheiden, zum Beispiel durch verschieden ausgelegte Beschleunigungsparameter. Riskante Überholmanöver werden wir sicherlich nicht umsetzen.
Wie weit ist denn die Car-to-Car-Kommunikation noch sinnvoll oder Stand der Dinge?
Die Vernetzung ist wichtig und die wird auch kommen. Wir werden die auch vorantreiben. Ich möchte aber nicht 1:1 von der Vernetzung abhängig sein, denn wenn die Verbindung gerade einmal schlecht ist, könnte ich keinen Automatikmodus anbieten. In der Form müssen wir von Vernetzung und Netzabdeckung unabhängig sein, um bestimmte Streckenabschnitte unvernetzt („offline“) fahren zu können. Aber wir möchten die Verbindung in gewissen Intervallen – alle Minuten bzw. alle paar Minuten – haben, um das Kartenmaterial zu aktualisieren und um Aktuelles zu erfahren, z.B. wenn in ein paar km voraus ein Unfall gemeldet wird. Der Fahrer muss trotzdem, wenn etwas Unvorhergesehenes passiert, damit umgehen. Aber für das System ist es hilfreich zu wissen: Zumeist lässt sich so deutlich komfortabler im Vorfeld die Route planen. Auch wenn irgendwo Glätte herrscht und wir haben diese Daten und können diese den anderen Fahrzeugen mitteilen, so klickt niemand das so ohne Weiteres weg, sondern jedenfalls passt besser auf.
Auch bei den Fahrzeugen wird es ja immer „weiße Flecken“ geben, also welche, die nicht in die Vernetzung einbezogen sind, oder wird dann so ein Tool einfach verordnet werden?
Ich denke nicht, dass da Nachrüstkits zwingend erforderlich werden. Wenn man ein Fahrzeug käuflich erworben hat und es ist für die Straße zugelassen ist, dann darf man auch damit fahren. Aber zukünftig wird jedes Auto in unseren Märkten die Vernetzung haben, die Technik wird also vorhanden sein und wir werden eine Übergangsphase mit Mischverkehr haben. Wir sind davon also nicht abhängig. Zum Beispiel bei einer vereisten Brücke wird das vernetzte Auto gewarnt und heruntergebremst und damit verlangsamt sich der Verkehr auch für die nicht Vernetzten. Es ist keine Verschlechterung zu heute, sondern in Zukunft besteht zumindest die Möglichkeit, dass durch die vernetzten Autos die Unfallgefahr auch für andere Verkehrsteilnehmer herabgesetzt wird. Die Vernetzung kommt, die Vernetzung ist wichtig, aber wir sind nicht davon abhängig.
Wie komplex wird die Wartung der Systeme zum autonomen Fahren für die Werkstatt sein?
Durch die Systeme nehmen Sensorik, Rechnerkapazität und Elektronik im Fahrzeug zu. Das müssen wir, auch über ein Autoleben lang beherrschen, die Systeme in der Form managen und das in die Hauptuntersuchungen (Anm.: entspricht der §57a-Überprüfung) mit aufnehmen, damit es weiterhin typisch mit abgeprüft wird. Die Systeme haben auch ab der Hochautomatisierung eine hohe Eigendiagnosefähigkeit. Wenn es da zu Auffälligkeiten kommt, wird sich das System nicht mehr aktivieren lassen. Wie dann eine Werkstatt mit der Fehlerbehebung betraut wird, soll – geht es nach uns – der Käufer selbst bestimmen. Wir werden aber die Hauptumfänge in die Hauptuntersuchung integrieren und die verschiedenen Hersteller sollten dann ihre Vertragswerkstätten entsprechend befähigen, trainieren. Das Berufsbild in einer Autowerkstatt nimmt an Herausforderungen zu und daher ist Bildung eine Top-Priorität in unseren Ländern.
Wie wird man vermeiden, dass z.B. beschlagene Kameras die Systeme lahmlegen?
Die Kamera der Zukunft wird erkennen, ob sie ein freies Sichtfeld hat, wenn sie verschmutzt ist oder ein durch Schlieren beeinträchtigtes Bild liefert. Sie wird dann Reinigung anfordern oder ein Reinigungssystem haben. Bei sehr starkem Nebel wird dann die Geschwindigkeit herabgesetzt oder ein System in der 1. Generation melden: Unter diesen Witterungsbedingungen ist das System noch nicht zugelassen. An dieser Stelle muss noch einmal der menschliche Fahrer selbst übernehmen.
Welche Dimension hat das Valeo-Geschäft mit Fahrerassistenzsysteme derzeit – und künftig?
Valeo ist ein großer Automobilzulieferer, auch wenn man aus Valeo-Teilen kein ganzes Auto zusammenbauen kann. Wir haben in der strategischen Ausrichtung 2 Hauptschwerpunkte: Der eine ist CO2-Reduzierung, zu dem der Antriebsstrang ebenso gehört wie beispielsweise die Klimaanlage. Der 2. ist intuitives Fahren, zu dem die Themen Vernetzung, Automatisierung mit den klassischen Fahrerassistenzsystemen wie Park- oder Notbremsassistent und Sicherheit sowie der Bereich Mensch-Maschine-Schnittstelle, also Vernetzung, bei der Daten mit dem Fahrer ausgetauscht werden, und Fahrerassistenz gehören. Richtig umgesetzt soll das, was der Fahrer bedient, ihn möglichst nicht vom Fahren ablenken. Für Valeo hat das Thema Fahrerassistenz, Sicherheit und Automatisierung hohen Stellenwert, weil der Markt gutes Wachstum zeigt, wobei eigentlich alle Geschäftsbereiche bei Valeo generell recht gut ausbalanciert sind. Der weltweite Gesamtmarkt dessen, was wir als Zuliefererindustrie bei den Herstellern mit Fahrerassistenz-, Park- und Sicherheitssystemen erlösen können, bewegt sich aktuell ganz grob bei etwa 10 Mrd. € Gesamtvolumen. Das wird sich in den nächsten 5 Jahren in etwa verdoppeln.
Wer könnte die Infrastruktur für die Vernetzung schaffen?
Für die Vernetzung der Fahrzeuge brauchen wir einen „Backend“-Server, einen Zentralrechner und es mögen auch mehrere mit unterschiedlichen Aufgaben an unterschiedlichen Orten sein oder unterschiedlichen Firmen gehören. Jedenfalls ist ein Rechner erforderlich, wo alle Daten hingehen, abgelegt und verarbeitet werden. Mit den Daten wollen wir etwas tun, daraus lernen und Daten in sortierter, aufbereiteter Form auch wieder zur Verfügung stellen: Entweder einem Drittanbieter oder anderen Fahrzeugen, um zum Beispiel aufgrund des Schlupfs am Rad auf die Glättegefahr auf einer Brücke hinweisen zu können.
Wie kann das praktisch zustande kommen?
Die Herausforderung ist zum einen, die Daten sauber zu analysieren: Wenn wir fahren, ist Sicherheit an oberster Stelle, wenn wir Daten hantieren, haben Privatsphäre und Datenschutz höchste Priorität. Die größere Herausforderung ist, dass nicht jeder die Daten für sich sammelt und der sinnvolle Austausch der Daten untereinander. Das geschieht heute schon mehr und mehr: Die Daten werden anonymisiert, verallgemeinert. So wird die Warnung vor Gefahrenstellen untereinander ausgetauscht und für andere nutzbar gemacht. Weil Daten einen Wert haben, vereinbaren die Firmen, die Daten untereinander austauschen, in kommerziellen Verträgen Austausch, Preise und Verwertung bzw. Aufgabenteilung, um dem Endverbraucher zu sinnvollen Kosten echten Mehrwert anbieten zu können. Die Herausforderung, die Datennutzung in Kooperationen kommerziell miteinander zu gestalten, ist wohl größer als die Serverstrukturen aufzubauen und Schnittstellen zu definieren oder die Software dafür zu programmieren. Das ist alles wichtig und auch nicht trivial. •